⌚Duración aproximada 1 sesión
Crea un algoritmo que permita a un vehículo autónomo detectar y evitar obstáculos en su entorno.
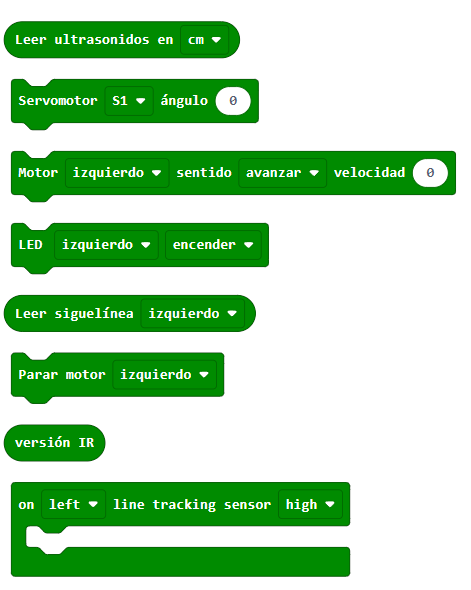
En este desafío puedes utilizar sensores como cámaras o ultrasonidos para identificar objetos (como peatones, otros vehículos o paredes) y desarrolla una lógica para evitar colisiones.
A continuación, te muestro un ejemplo de cómo podría comportarse el robot cuando se mueva por la ciudad:
| Cuando pulsemos el botón A en la placa micro:bit |
|
Se trata que el robot haga la siguiente secuencia de movimiento: Camina hacia adelante si distancia < (valor) En caso contrario retrocede o gira en un sentido. Al detectar un obstáculo emite un sonido o enciende las luces de emergencia |
Aquí puedes ver cómo podríamos plantear el pseudocódigo que necesitamos para nuestro programa que permita detectar obstáculos.

 Ya sabéis que me tomo muy en serio vuestra formación. Por esto, he pensado que es importante conocer cómo funciona el sensor de ultrasonidos.
Ya sabéis que me tomo muy en serio vuestra formación. Por esto, he pensado que es importante conocer cómo funciona el sensor de ultrasonidos.